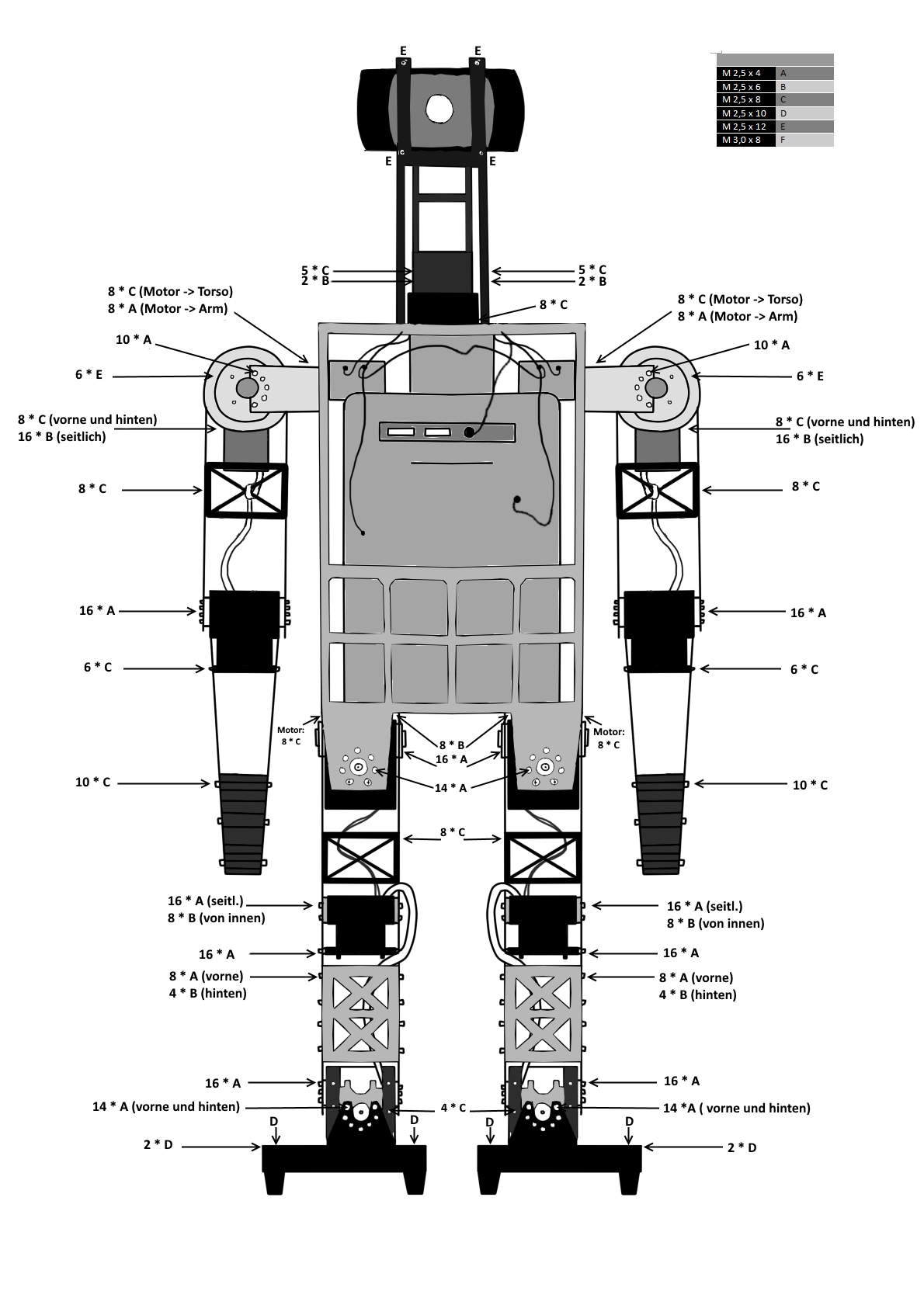
Screws
Wolfgang
By Position
Position |
Type |
Amount |
Per Robot |
Camera holder |
M2,5x12 |
4 |
1 |
Head -> HeadTilt |
M2,5x8 |
10 |
1 |
HeadTilt -> HeadPan |
M2,5x6 |
4 |
1 |
HeadPan -> Torso |
M2,5x8 |
8 |
1 |
Protectors Torso |
M2,5x8 |
3 |
4 |
L/RShoulderPitch -> Torso |
M2,5x8 |
8 |
2 |
L/RShoulderPitch -> Shoulder |
M2,5x4 |
8 |
2 |
L/RShoulderRoll -> Shoulder |
M2,5x4 |
5 |
2 |
Shoulder Protector |
M2,5x8 |
6 |
2 |
Shoulder Protector -> L/RShoulderRoll |
M2,5x5 |
4 |
2 |
Shoulder Protector -> Shoulder |
M2,5x8 |
5 |
2 |
ShoulderRoll -> Upper Arm (Front/Back) |
M2,5x8 |
8 |
2 |
ShoulderRoll -> Upper Arm (on the side) |
M2,5x6 |
16 |
2 |
Upper Arm stabilizer |
M2,5x8 |
4 |
4 |
L/RElbow -> Upper Arm |
M2,5x4 |
16 |
2 |
L/RElbow -> Lower Arm |
M2,5x8 |
12 |
2 |
Hand Stabilizer |
M2,5x8 |
10 |
2 |
L/RHipYaw -> Torso |
M2,5x8 |
8 |
2 |
L/RHipYaw -> Hip Joint |
M2,5x6 |
8 |
2 |
L/RHipRoll -> L/RHipPitch (front) |
M2,5x6 |
4 |
2 |
L/RHipRoll -> L/RHipPitch (side) |
M2,5x8 |
4 |
2 |
L/RHipRoll+Pitch -> Hip Joint (F./B.) |
M2,5x4 |
14 |
2 |
L/RHipPitch -> Hip Joint (side) |
M2,5x8 |
4 |
2 |
L/RHipPitch -> Upper Leg |
M2,5x4 |
16 |
2 |
Upper Leg Stabilizer |
M2,5x8 |
4 |
4 |
L/RKnee -> Upper Leg (side) |
M2,5x4 |
16 |
2 |
L/RKnee -> Upper Leg (in the leg) |
M2,5x6 |
8 |
2 |
L/RKnee -> Lower Leg |
M2,5x4 |
16 |
2 |
Lower Leg Stabilizer (front) |
M2,5x4 |
8 |
2 |
Lower Leg Stabilizer (back) |
M2,5x6 |
4 |
2 |
L/RFootPitch -> Lower Leg |
M2,5x4 |
16 |
2 |
L/RFootPitch -> L/RFootRoll (inside) |
M2,5x8 |
4 |
2 |
L/RFootPitch -> L/RFootRoll(from back) |
M2,5x6 |
4 |
2 |
Feet Motors -> Foot Plate (front/back) |
M2,5x4 |
14 |
2 |
Feet Motors->Foot Plate(side of front) |
M2,5x8 |
4 |
2 |
Cleat (Ger: Stollen) |
M2,5x10 |
1 |
8 |
Stopper |
M2,5x10 |
2 |
2 |
Bearings |
M3x8 |
1 |
35 |
By Count
|
|
M2,5x4 |
268 |
M2,5x6 |
100 |
M2,5x8 |
166 |
M2,5x10 |
12 |
M2,5x12 |
16 |
M3x8 |
35 |
Layout